
This patent introduces a groundbreaking solution for managing the trajectory of flight vehicles and similar systems with unprecedented precision. Traditional control systems like the Proportional, Integral, Derivative (PID) controller, while reliable, often result in suboptimal performance due to their approximation-based approach, leading to issues such as overdamping, underdamping, and oscillation. Recognizing the limitations of existing methods, especially in applications requiring precise control over both spatial and temporal parameters, our invention offers a novel methodology.
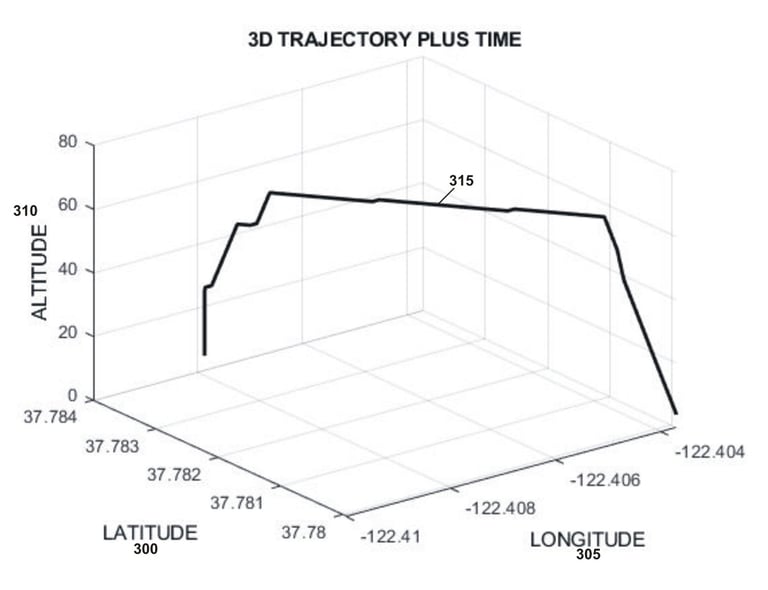
Continuous Path Regulator (CPR)
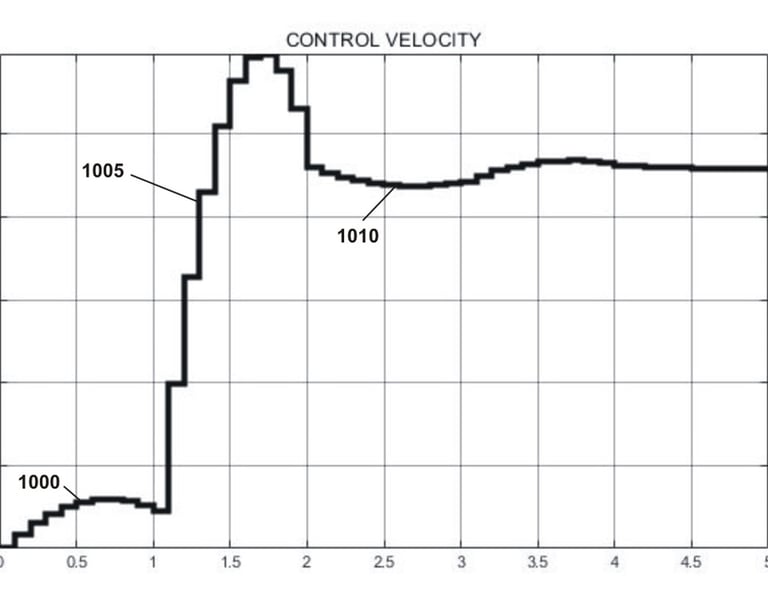
High Accuracy Control: This system maintains exact control over multiple variables simultaneously, including but not limited to distance, velocity, and time, ensuring the precise positioning of vehicles in three-dimensional space (X, Y, and Z coordinates) at any given moment. Advanced Mathematical Framework: Unlike traditional first-order control systems, our approach utilizes higher-order mathematical equations to describe the trajectory, enabling a "Correct by Construction" solution that ensures high fidelity to the desired path. Versatile Trajectory Modeling: The system defines trajectories using a variety of mathematical constructs, from simple lines to complex splines, allowing for flexible and accurate path planning. This method accommodates any number of waypoints, offering a robust framework for defining precise movements through space. Innovative Velocity Assignment: Each segment of the trajectory can be assigned a velocity value, whether constant or variable, expressed through graphs, splines, or mathematical equations, integrating the time dimension into the control system with mathematical rigor.
Our patent sets a new standard for control systems in robotics, animatronics, and flight path management, providing a solution that simultaneously addresses spatial and temporal requirements with high accuracy. This technology represents a significant leap forward in the precision and reliability of trajectory-based control systems, offering a versatile and efficient approach to managing complex movements in dynamic environments.
US Patent Application 17/079,424 Status: Examiner Rebuttal Submitted
This patent presents a groundbreaking Multi-Agent cooperative autorouting system that incorporates time as a crucial dimension, alongside spatial coordinates, to compute precise, "Correct by Construction" navigational trajectories. This innovative system is designed to ensure path deconfliction by accounting for timed events and the movement of other vehicles within the operational space, thereby enhancing safety and efficiency in complex environments.


Multi-Agent 4-Dimensional Trajectory Autorouting
Advanced Cooperative Trajectory Management: Unlike traditional methods that rely on manual planning, simulation, or 2D and 3D models, our system introduces a novel approach to managing trajectories cooperatively and dynamically, ensuring high-speed navigation through intricate environments.
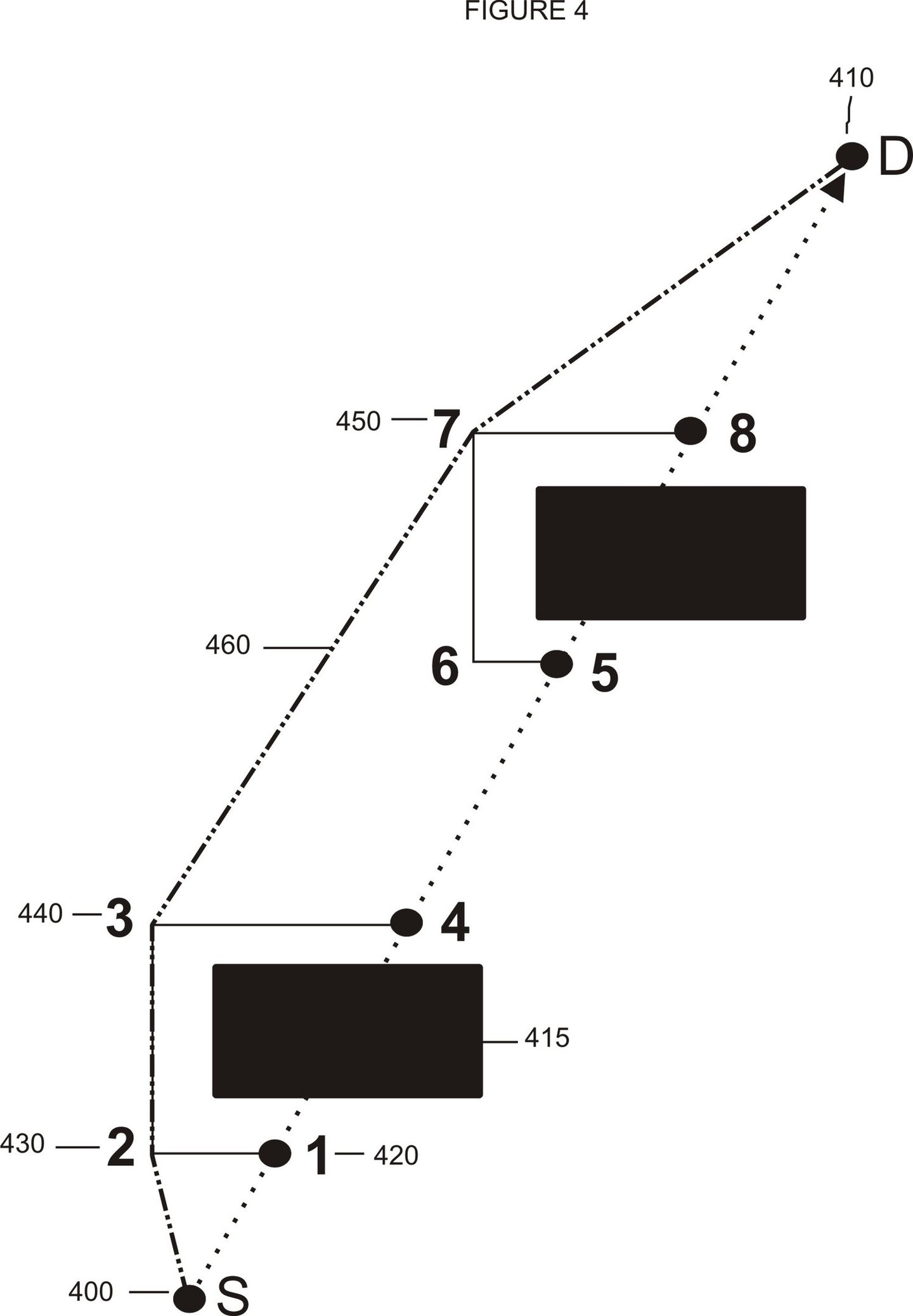
Efficient Computational Strategy: By combining virtual grid routing with probe routing techniques, the system effectively overcomes the limitations of computational runtime and storage, typically associated with gridded autorouting and probe routing methods. This hybrid approach maintains the directness of line-of-sight paths at any angle, optimizing the efficiency of planned routes. Rather than trying to find a way through the open space between obstructions, this approach uses the geometry of the obstruction itself to inform the route trajectory process.
Multi-Agent Computational Techniques: The system leverages Multi-Agent computational strategies to divide the overall problem into independent computational segments, enabling faster computation of cooperative flight paths by allowing multiple simultaneous autorouting processes within a shared operational area.
Reduced Computational Complexity: Through strategic modeling and the conceptualization of each trajectory segment with a given average velocity, the system simplifies the computational architecture. By expressing the trajectory in relation to time (T), the system integrates all four dimensions (X, Y, Z, and T) within a single computational structure, reducing runtime and storage requirements.
4-Dimensional Cooperative Paths: The autorouting process begins with computing a line-of-sight vector from source to destination, followed by identifying any obstructions. Utilizing Multi-Agent, Mesh, or other search techniques, the system efficiently navigates around obstacles, creating a seamless path defined by a series of splines. These splines are designed to ensure constant velocity at transition points, minimizing acceleration and enhancing the smoothness of vehicle movement.
This invention sets a new benchmark for autorouting systems, offering a scalable, efficient solution for managing complex trajectories in multi-dimensional spaces. By addressing the challenges of traditional routing methods and introducing a sophisticated approach to cooperative navigation, our system promises significant advancements in the field of autonomous vehicle movement and operational management.
US Patent Application 17/489,642 Status: Examiner Rebuttal Submitted
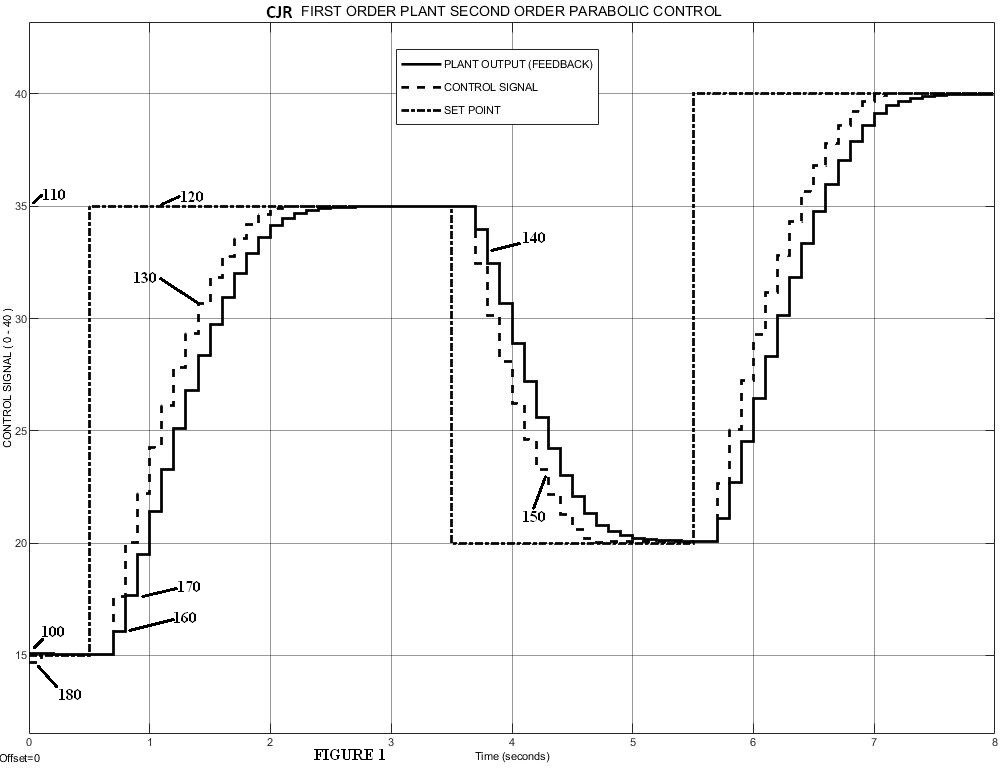
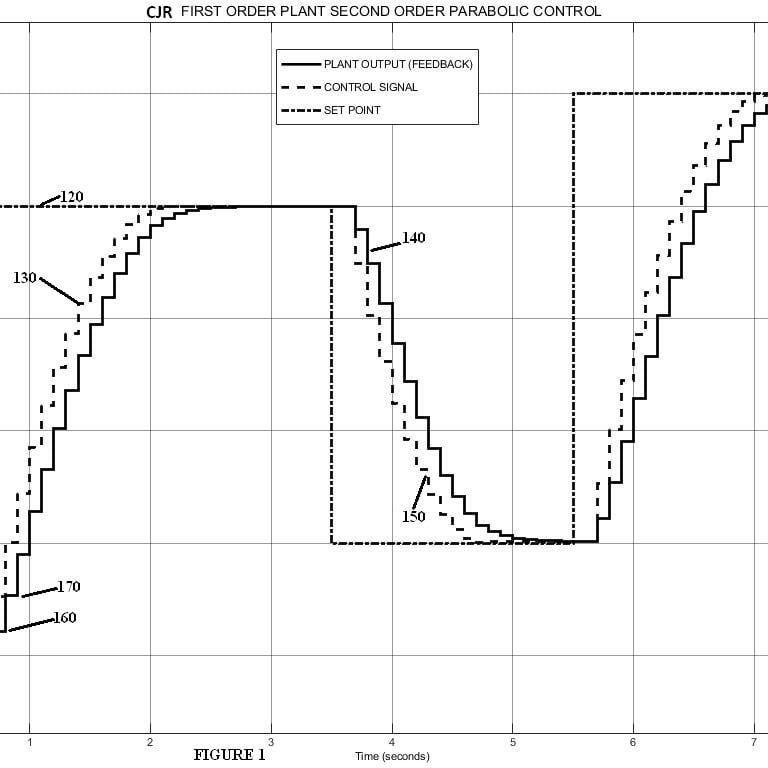
The Curve Junction Regulator (CJR) represents a pioneering advancement in control systems, overcoming the limitations of traditional Proportional, Integral, Derivative (PID) controllers but without the computational complexity and overhead of iterative solutions such as LQR. By applying higher-order mathematical principles, the CJR achieves precise control over system state changes without the need for extensive tuning, thereby eliminating common issues such as overshoot, underdamping, and oscillation associated with PID systems.
PID Without Tuning: The Curve Junction Regulator (CJR)
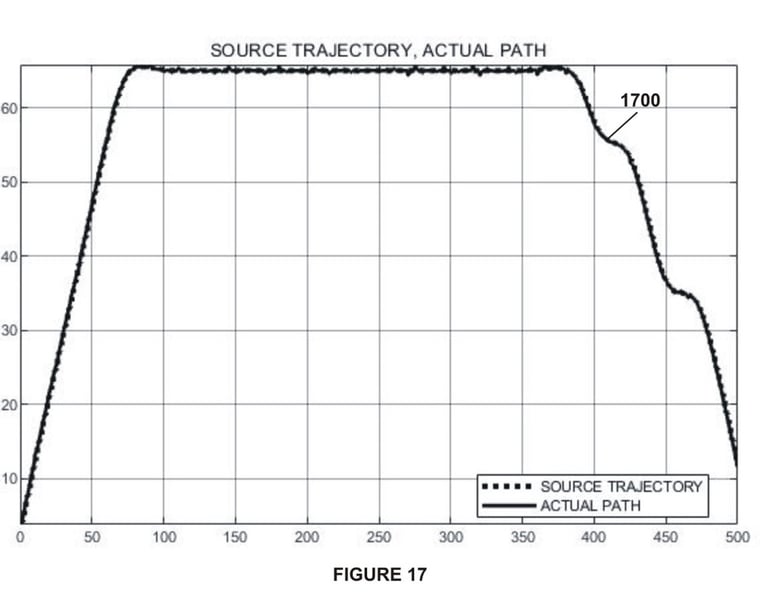
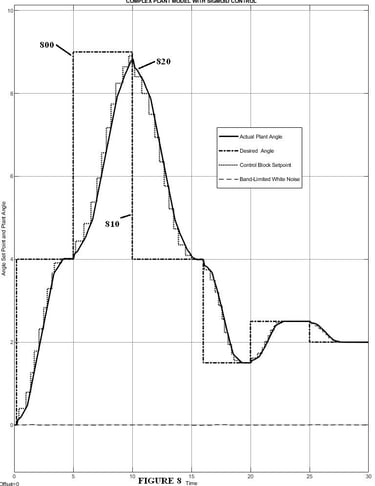
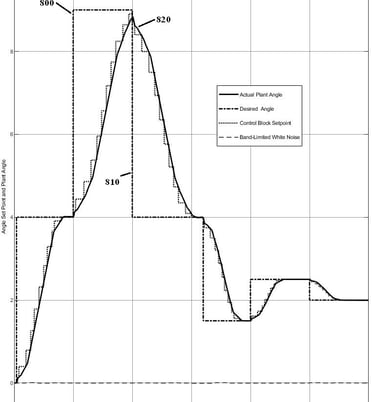
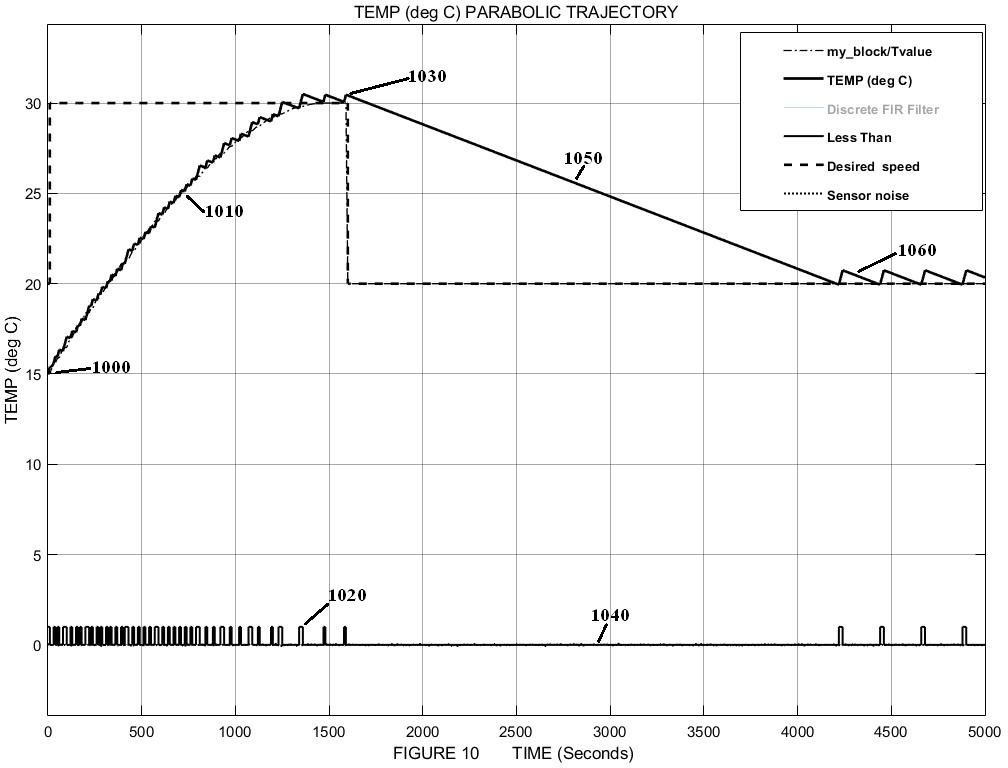
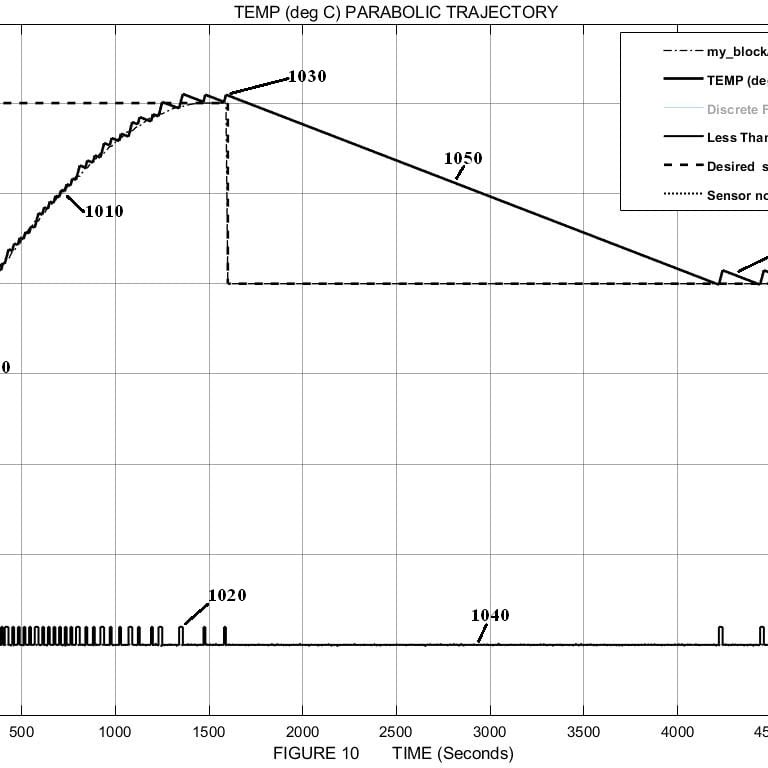
Time as a Control Variable: Unlike PID controllers that rely on a constant time frame for error calculation and correction, the CJR treats time as a variable. This approach aligns the rate of change in the control signal with the dynamics of the plant model, ensuring a more natural and efficient transition between states for linear, parabolic, and even sigmoid plan models.
High-Order Polynomial Trajectories: The CJR utilizes parabolic or higher-order polynomial equations to define the desired state change trajectory, allowing for a fast start and a slow approach to the setpoint. This method avoids the limitations of linear P terms and the compensatory mechanisms of I and D terms, streamlining the control process.
Automatic Gain Control (AGC): By defining error in terms of the time difference between the parabolic template and actual plant output, the CJR modulates control signal output through AGC. This ensures that the plant reaches the setpoint at the precise moment defined by the curve junction, without the need for traditional PID tuning.
Adaptability to Plant Dynamics: The CJR's methodology is inherently adaptive to the plant's response dynamics, as the parabolic trajectory is constructed to match the specific state change required. This adaptability ensures optimal performance without prior detailed knowledge of the plant model's dynamics.
Versatility Across State Changes: Whether dealing with large or minor adjustments, rising or falling state changes, the CJR's parabolic control signal trajectory can be customized to the specific requirements of each situation, ensuring smooth and accurate control.
The Curve Junction Regulator introduces a significant leap forward in control system technology, offering a versatile, efficient, and precise method for managing state changes in a wide range of applications. By addressing the fundamental challenges of PID controllers and leveraging advanced mathematics, the CJR sets a new standard for automated control, enhancing stability, accuracy, and operational efficiency.
US Patent Application 18/325,389 Status: In Submission
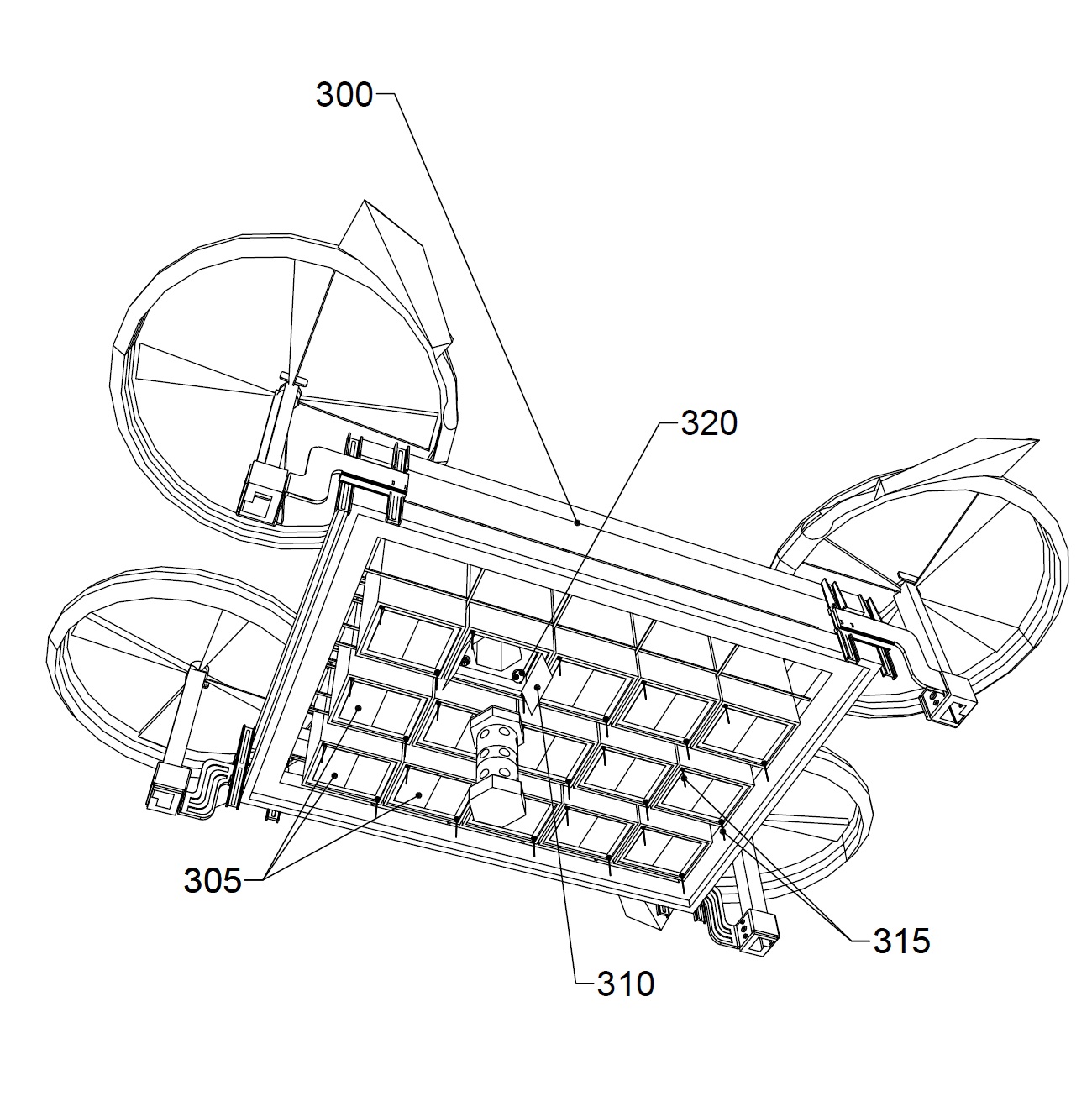
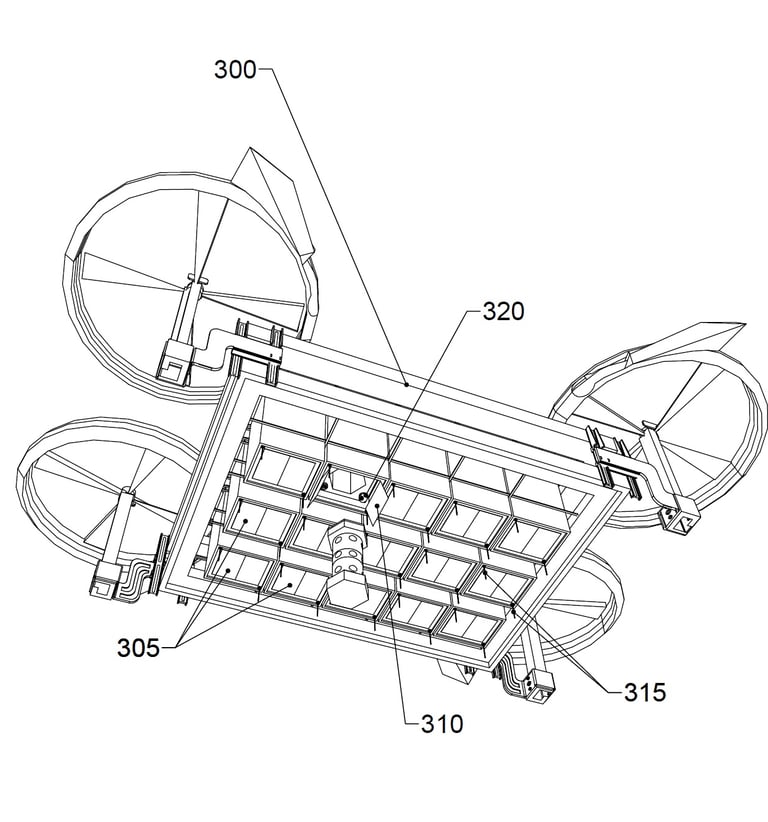
This patent introduces a cutting-edge solution for mail delivery, leveraging Unmanned Aerial Vehicles (UAVs) to automate and streamline the process, thereby addressing the financial and operational challenges faced by government postal services in the era of digital communication. By integrating advanced flight navigation and safety measures, this system promises to revolutionize mail delivery to homes and businesses with unprecedented efficiency and safety.
Mail Delivery via Uncrewed Aerial Vehicle
Automated Delivery: The system ensures fully automated mail delivery using UAVs, significantly reducing operational costs associated with traditional mail delivery methods. Notably, it uses almost all of the same technology, vehicle, and command and control hardware and software as the Urban UAV Delivery system.
Enhanced Safety Measures: Safety is paramount, achieved through maintaining a safe distance between UAVs and the public. The system employs pre-programmed 4-Dimensional trajectories, ensuring precise navigation while minimizing the risk of accidents.
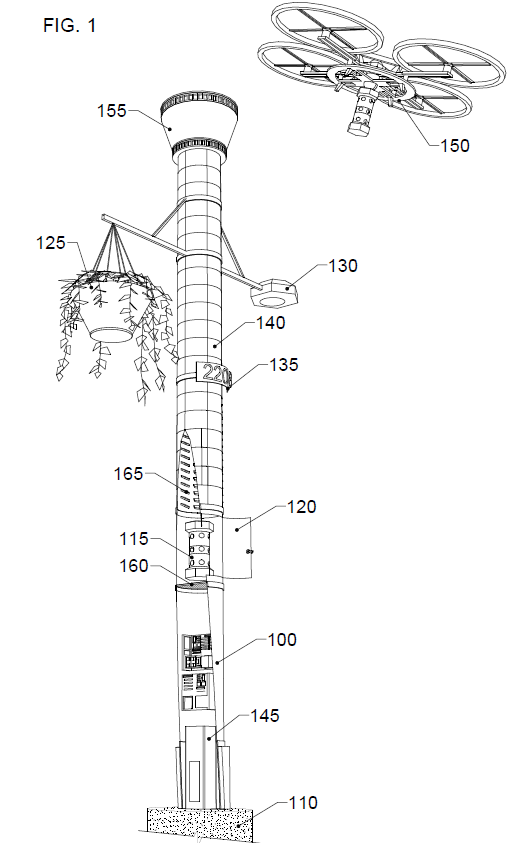
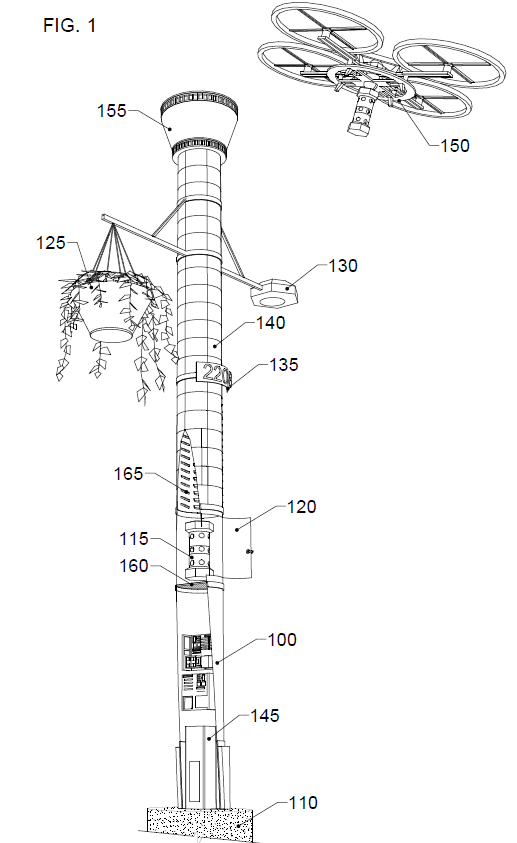
Innovative Delivery Structures: Similar to urban drone delivery kiosks, the system utilizes tall, cylindrical stands, referred to as "Drone Pipes," for mail drop-off and pickup. These structures, standing approximately 3 meters tall, are designed to keep UAVs away from people, pets, and obstacles, enhancing safety and accessibility.
Free Flight Corridor: The system introduces a Free Flight Corridor (FFC) or Inverse-Geofencing, restricting UAV operations to predefined safe areas, further ensuring public safety and efficient navigation.
Compatibility with Existing Infrastructure: The design draws parallels with traditional cluster boxes and pneumatic tube handling, yet offers a modern twist by accommodating automated drone deliveries. This blend of traditional and innovative elements facilitates a seamless transition to drone-based mail delivery systems.
Compared to the urban drone delivery system described, this mail delivery system shares similarities in employing automated kiosks (Drone Pipes at the residences) for secure and efficient pneumatic tube handling. Rather than permanently installed kiosks, the mail handler kiosks are designed as moving delivery trucks servicing entire neighborhoods. Initially driven, eventually they can be fully automated because of their limited range and scope. Both systems prioritize safety through controlled UAV flight paths and leverage automation to reduce human intervention, thereby optimizing operational efficiency. However, this mail delivery system specifically addresses the unique challenges of postal services, providing a tailored solution that integrates seamlessly with the existing postal infrastructure while embracing the benefits of modern UAV technology.
US Patent US-010740723-B2 Status: GRANTED
Contacts
info@industrialflightandmagic.com
Subscribe to our newsletter
(530) 277-1196